ファイル作成時間を見ると試験後っぽいので、おそらく移動したときに「書こう」って思っただけかもしれない。
OSの位置づけ
コンピュータシステムはハードウェアとソフトウェアの2つの構成要素からなる。
ソフトウェアがインストールされていないコンピュータは「ベアマシン」と呼ばれていて、それを直接使うのは不便で、効率も悪い。
オペレーティングシステム(OS)は、人と機械のギャップを埋めるためのソフトウェアで、ユーザーとコンピュータのインターフェース的な存在。
OSの位置づけは下図のとおり:
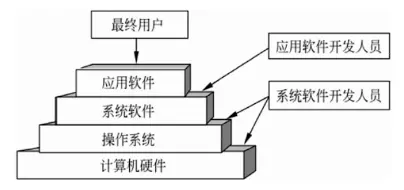
図からもわかるように、OS はベアマシン上の最初のソフトで、ハードウェア機能を最初に拡張する存在。他のすべてのソフト(編集、アセンブラ、コンパイラ、DB管理など)やアプリケーションは OS の上に成り立ってる。
ユーザーから見ても、OS があれば直接ハードをいじらずに済むし、OS 経由でコマンドやサービスを使って操作できる。だから OS はユーザーとコンピュータの間の重要な橋渡し役になってる。
プロセス管理
プロセス管理(=プロセッサ管理)は、複数のプログラムが同時に実行される環境(多重プログラミング、タイムシェアリングなど)で、各プログラムの動的な状態を「プロセス」として扱う。
プロセスは「リソースを持ち独立して動ける単位」で、同時実行や協調動作・競合の制御が必要になる。
順次実行の特徴
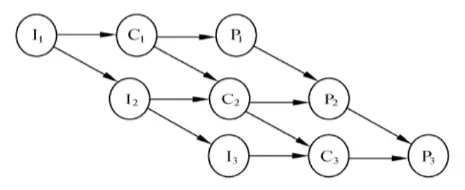
前順関係を示すグラフ(有向非巡回グラフ)で、ノードは処理単位、矢印は順番の関係を表す。
たとえば Pi→Pj なら「Pi が終わらないと Pj は実行できない」。
次の図では、入力→計算→出力の順番関係:

順次実行の特徴は、以下の3つ:
- 順序性
- 閉鎖性(外部の影響なしに動く)
- 再現性(毎回同じ結果)
同時実行の特徴
多重プログラムを導入すると、プログラムは並列に実行されることになる。
前順関係のない処理は、CPU・I/O に並行して割り当てできる。
たとえば CPU、入力デバイス、出力デバイスが1つずつあるときの例:
このときの特徴は以下:
- 閉鎖性がなくなる
- 実行順が固定でなくなる
- プロセス間の制約が発生する(干渉・協調)
プロセス状態と状態遷移
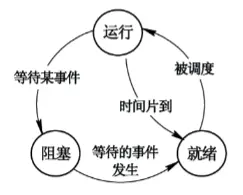
三態モデル
基本的な3つの状態:
| 状態 | CPU | リソース |
|---|---|---|
| 実行 | 〇 | 〇 |
| 準備 | × | 〇 |
| 待機 | × | × |
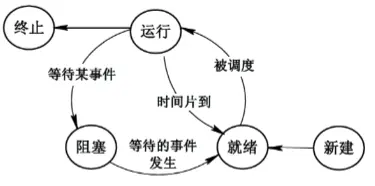
五態モデル
現実のシステムでは「新規作成」「終了待ち」も加わる:
プロセス間通信
複数のプロセスが同時に動くと、リソースの共有や協調作業が必要になる。
このときの情報のやりとりが「プロセス間通信」。
同期(synchronization):協調に必要な直接的な制御
排他(mutual exclusion):リソースをめぐる間接的な制御
同期
たとえば A がバッファにデータを書いて、それを B が読む場合、A が終わらないと B は動けない。
つまり「同期」とは、協調動作を行うプロセス同士のタイミング合わせのこと。
排他
同時に1つしか使えないリソース(=クリティカルリソース)を複数のプロセスが取り合うこと。
たとえばプリンタ、共有変数など。
クリティカルセクションの管理ルール
- 空いてたら入る
- 他が使ってたら待つ
- 必ず順番が回ってくる
- 待ち続けず、CPU を手放す
セマフォ(信号量)
Dijkstra が提唱した手法。
以下2つの型がある:
- 公共セマフォ(初期値 1):排他制御
- 私用セマフォ(初期値 0):同期制御
P/V操作
| |
▶ 詳しくは: 【操作系统】进程间通信—互斥
同期制御の例
典型例:単一バッファの producer/consumer 問題。 セマフォの値 0 → データなし、1 → データあり。
▶ 詳しくは: 【操作系统】进程间通信—同步
デッドロック(死锁)
例:リソース m=5、プロセス数 n=3、各プロセスは k=3 個必要 → m<nk ならデッドロックになる可能性あり
回避条件:m ≥ n×(k-1)
デッドロックの対策
- 放置(見なかったフリ)
- 予防(4条件の破壊)
- 静的割当:最初に全部渡す(効率悪い)
- 順序割当:リソースに優先順をつける
- 回避:状態を常にチェック(代表:銀行家のアルゴリズム)
▶ 銀行家算法: 動画リンク
スレッド
プロセスは「リソース単位」であり、「スケジューリング単位」でもあるけど、 これだと切り替えコストが高くなる。 そこで、「リソース=プロセス」「スケジューリング=スレッド」と分けた。
スレッドは「軽量プロセス」とも呼ばれて、同じプロセス内のスレッド同士はメモリ空間などを共有できる。
つまり:
- スレッド切り替えは軽い
- 複数タスクを高速に動かせる
- リソースはプロセス単位で保持される